The evolution of cleaning robotics has reached remarkable sophistication through advanced artificial intelligence systems that enable autonomous navigation, environmental mapping, and intelligent cleaning strategies. At the forefront of this technological revolution stand two pioneering approaches embodied by iRobot’s Roomba series and Neato Robotics’ Botvac lineup, each representing fundamentally different philosophies in robotic navigation and artificial intelligence implementation. These competing technologies have redefined household automation while showcasing the practical applications of complex AI algorithms in consumer products that millions of users interact with daily.
Explore the latest AI trends in robotics to understand how autonomous navigation technologies are advancing across various industries and applications. The competitive landscape between these two navigation paradigms reflects broader developments in artificial intelligence, sensor fusion, and autonomous systems that extend far beyond household cleaning into industrial automation, autonomous vehicles, and space exploration robotics.
Foundations of Robotic Navigation Intelligence
The fundamental challenge in cleaning robotics lies in creating artificial intelligence systems capable of understanding, mapping, and efficiently navigating complex three-dimensional environments while simultaneously performing cleaning tasks. Both iRobot Roomba and Neato Botvac have developed sophisticated solutions to this multifaceted problem, though their approaches diverge significantly in sensor technology, algorithmic implementation, and overall navigation philosophy. The underlying AI systems must process real-time environmental data, make split-second navigation decisions, optimize cleaning coverage, and adapt to dynamic obstacles while maintaining operational efficiency throughout extended cleaning cycles.
Modern robotic vacuum cleaners represent remarkable achievements in miniaturized artificial intelligence, incorporating advanced sensor arrays, powerful processing units, and sophisticated software algorithms within compact, consumer-friendly devices. The navigation systems deployed in these robots demonstrate practical implementations of simultaneous localization and mapping algorithms, computer vision processing, and predictive behavior modeling that rival technologies found in much larger and more expensive autonomous systems across various industries.
iRobot Roomba’s Adaptive Intelligence Approach
The iRobot Roomba series has evolved through multiple generations of artificial intelligence implementations, transitioning from early random navigation patterns to sophisticated visual simultaneous localization and mapping systems that create detailed environmental maps while cleaning. The latest Roomba models incorporate advanced computer vision technology through ceiling-mounted cameras, infrared sensors, and accelerometers that work in concert to build comprehensive spatial understanding of cleaning environments. This sensor fusion approach enables the Roomba to identify furniture, detect stairs, recognize room boundaries, and adapt cleaning patterns to specific environmental characteristics.
Experience advanced AI capabilities with Claude for understanding complex algorithmic implementations and navigation system design principles that drive modern robotic intelligence. The Roomba’s artificial intelligence system employs probabilistic algorithms that account for sensor uncertainty, environmental changes, and unexpected obstacles through adaptive behavior modification that improves cleaning efficiency over time through machine learning implementations.
The visual simultaneous localization and mapping technology in modern Roomba units represents a significant advancement over earlier models that relied primarily on bump sensors and random walk algorithms. The integration of optical flow sensors, dirt detection algorithms, and smart mapping capabilities enables these robots to create persistent maps that improve cleaning efficiency across multiple cleaning sessions. The AI system learns room layouts, identifies high-traffic areas requiring frequent attention, and optimizes cleaning schedules based on historical usage patterns and environmental conditions.
Neato Botvac’s Precision LiDAR Navigation
Neato Robotics has distinguished itself through the implementation of laser distance scanning technology that provides unprecedented precision in environmental mapping and navigation planning. The Botvac series utilizes rotating LiDAR systems that generate detailed 360-degree environmental scans, creating highly accurate floor plans that enable systematic cleaning patterns and efficient coverage optimization. This laser-based approach provides superior accuracy in distance measurement, obstacle detection, and spatial mapping compared to camera-based systems, particularly in challenging lighting conditions or environments with reflective surfaces.
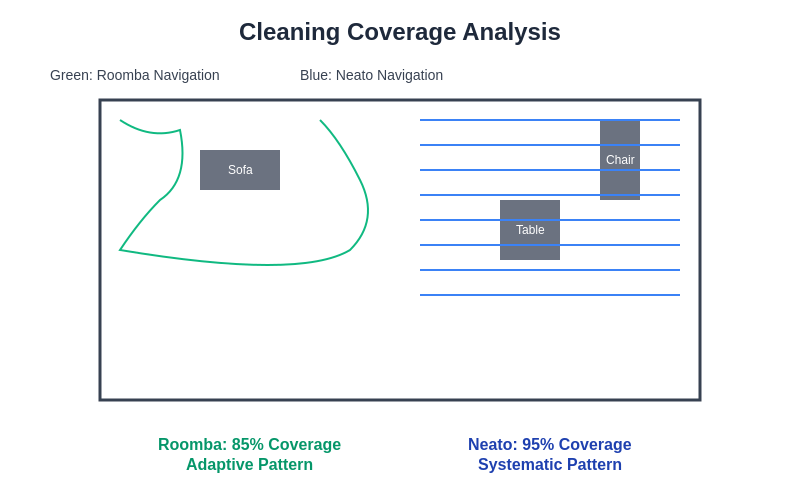
The LiDAR-powered navigation system in Neato Botvac robots enables methodical cleaning patterns that follow logical, straight-line paths rather than seemingly random movements. The artificial intelligence algorithms process laser scan data to identify room boundaries, furniture placement, and optimal cleaning routes that minimize redundant coverage while ensuring comprehensive floor cleaning. This systematic approach results in predictable cleaning times, efficient battery utilization, and consistent cleaning results that can be particularly advantageous for users who prefer structured, methodical cleaning operations.

The precision offered by LiDAR technology extends beyond basic navigation to enable advanced features such as virtual boundary creation, zone-specific cleaning schedules, and detailed cleaning analytics that provide users with comprehensive insights into cleaning performance and environmental characteristics. The mapping accuracy achieved through laser scanning enables persistent map storage, multi-floor mapping capabilities, and intelligent room recognition that enhances user control and cleaning customization options.
Algorithmic Approaches and Decision Making
The artificial intelligence systems powering both Roomba and Botvac robots employ sophisticated algorithmic frameworks that balance competing objectives including cleaning coverage, energy efficiency, obstacle avoidance, and time optimization. Roomba’s AI implementation focuses on adaptive behavior that responds dynamically to environmental conditions, utilizing reinforcement learning principles to improve cleaning performance through experience accumulation. The system employs probabilistic decision-making algorithms that account for sensor uncertainty while maintaining robust performance across diverse environmental conditions.
Neato’s algorithmic approach emphasizes deterministic planning based on precise environmental models created through LiDAR scanning. The navigation algorithms utilize graph-based path planning techniques that optimize cleaning routes based on complete environmental knowledge, enabling predictable cleaning patterns and systematic coverage verification. This approach provides advantages in cleaning efficiency and user predictability while requiring more computational resources for map processing and route optimization.
The behavioral differences between these algorithmic approaches become apparent in how each system handles unexpected obstacles, environmental changes, and cleaning optimization strategies. Roomba’s adaptive intelligence excels in dynamic environments where furniture placement changes frequently, while Neato’s precision planning provides superior performance in stable environments where systematic cleaning patterns can be optimized and repeated consistently.
Sensor Technology and Environmental Perception
The sensor arrays implemented in modern cleaning robots represent sophisticated examples of multi-modal perception systems that fuse data from diverse sources to create comprehensive environmental understanding. Roomba’s sensor suite typically includes optical cameras, infrared sensors, bump sensors, cliff sensors, and dirt detection systems that work together to provide robust environmental awareness across various lighting conditions and surface types. The integration of multiple sensor modalities enables redundant perception capabilities that maintain navigation performance even when individual sensors encounter challenging conditions.
Discover comprehensive AI research capabilities with Perplexity for exploring the technical specifications and performance characteristics of advanced sensor systems used in autonomous robotics applications. The sensor fusion algorithms employed in these systems demonstrate practical implementations of Kalman filtering, particle filtering, and Bayesian estimation techniques that are fundamental to autonomous system development across numerous industries.
Neato’s sensor implementation centers around high-precision LiDAR technology supplemented by traditional bump sensors, cliff sensors, and charging dock detection systems. The laser ranging system provides millimeter-accurate distance measurements across 360-degree scans, enabling precise mapping and navigation that surpasses the accuracy achievable through camera-based systems alone. However, this laser-centric approach may encounter limitations in environments with highly reflective surfaces, transparent obstacles, or complex lighting conditions that can interfere with laser ranging accuracy.
Mapping Capabilities and Spatial Intelligence
The mapping technologies employed by these robotic systems showcase different approaches to spatial intelligence and environmental representation. Roomba’s visual SLAM implementation creates probabilistic maps that account for sensor uncertainty while building increasingly accurate representations of cleaning environments over time. The mapping process incorporates visual landmarks, geometric features, and spatial relationships to create persistent maps that enable efficient cleaning coverage and smart home integration capabilities.
Neato’s laser-based mapping generates highly detailed floor plans with precise dimensional accuracy that enables advanced features such as room labeling, virtual boundary creation, and zone-specific cleaning schedules. The mapping precision achieved through LiDAR technology supports sophisticated spatial analysis including room size calculation, furniture placement tracking, and traffic pattern identification that enhances cleaning optimization and user control options.
The persistence and accuracy of these mapping systems directly impact cleaning efficiency, user experience, and long-term performance optimization. Roomba’s adaptive mapping approach excels in environments where flexibility and adaptability are prioritized, while Neato’s precision mapping provides advantages in applications requiring detailed spatial analysis and systematic cleaning verification.
Performance Optimization and Learning Systems
Both robotic platforms incorporate machine learning capabilities that enable performance improvement through experience accumulation and pattern recognition. Roomba’s AI system learns from cleaning sessions to identify high-traffic areas, optimal cleaning schedules, and environmental patterns that inform future cleaning strategies. The learning algorithms analyze cleaning effectiveness, battery consumption, and user preferences to optimize cleaning parameters and scheduling recommendations.
Neato’s learning systems focus on route optimization, map refinement, and cleaning efficiency improvements based on accumulated environmental data and cleaning performance metrics. The system analyzes cleaning coverage, time efficiency, and obstacle encounters to refine navigation algorithms and improve future cleaning performance. The precision mapping capabilities enable detailed performance analysis including coverage verification, missed area identification, and cleaning time optimization.
The integration of cloud connectivity in modern robotic systems enables advanced analytics, remote monitoring, and software updates that continuously enhance AI capabilities and cleaning performance. These connected features demonstrate the evolution of household robotics toward comprehensive smart home ecosystems that provide users with detailed insights and control options previously unavailable in consumer cleaning products.
Environmental Adaptability and Challenge Response
The ability to adapt to diverse environmental conditions represents a critical capability for robotic cleaning systems that must operate effectively across varied household layouts, floor types, and obstacle configurations. Roomba’s adaptive intelligence system employs behavioral modification algorithms that adjust cleaning patterns based on environmental feedback, obstacle density, and cleaning effectiveness metrics. The system can modify navigation strategies for different floor types, furniture arrangements, and lighting conditions while maintaining consistent cleaning performance.
Neato’s systematic approach provides advantages in stable environments where precise mapping and methodical cleaning patterns can be optimized for maximum efficiency. The LiDAR-based navigation maintains consistent performance across lighting variations and provides reliable obstacle detection that enables confident navigation in complex environments. However, the reliance on laser ranging may encounter challenges in environments with highly reflective surfaces or transparent obstacles that can interfere with distance measurement accuracy.
The robustness of these navigation systems under challenging conditions directly impacts user satisfaction and cleaning reliability. Both platforms have evolved through multiple generations to address common environmental challenges including pet hair accumulation, furniture leg navigation, cord management, and multi-surface cleaning optimization.
Integration with Smart Home Ecosystems
Modern robotic cleaning systems have evolved beyond standalone appliances to become integral components of comprehensive smart home ecosystems that enable sophisticated automation, scheduling, and integration with other household systems. Roomba’s smart home integration capabilities include voice control compatibility, smartphone app connectivity, and integration with popular home automation platforms that enable coordinated operation with other smart devices.
Neato’s smart home features emphasize detailed mapping integration, zone-specific control, and comprehensive cleaning analytics that provide users with unprecedented control over cleaning operations. The precision mapping capabilities enable advanced features such as virtual room division, targeted cleaning schedules, and detailed performance reporting that enhances user control and cleaning customization options.
The evolution toward connected robotic systems demonstrates the broader trend of household automation that leverages artificial intelligence to provide enhanced convenience, efficiency, and user control. These integration capabilities enable cleaning robots to participate in comprehensive home automation scenarios that coordinate multiple devices and systems to optimize household management and energy efficiency.
Future Developments and Technological Trajectories
The continued evolution of cleaning robotics artificial intelligence points toward increasingly sophisticated systems that will incorporate advanced machine learning, enhanced sensor technologies, and deeper smart home integration. Future developments may include improved object recognition capabilities, advanced debris analysis, predictive maintenance systems, and enhanced user interaction through natural language processing and gesture recognition technologies.
The competitive landscape between different navigation approaches continues to drive innovation in sensor technology, algorithmic development, and user experience design. Emerging technologies such as computer vision enhancement, advanced machine learning implementations, and improved sensor fusion techniques promise to further enhance the capabilities and reliability of autonomous cleaning systems.
The broader implications of these technological developments extend beyond household cleaning to influence autonomous system development across industries including healthcare, manufacturing, and service robotics. The practical implementation of artificial intelligence in consumer products provides valuable insights and development experience that contributes to the advancement of autonomous systems across numerous applications and industries.
Conclusion and Technological Assessment
The comparison between iRobot Roomba and Neato Botvac navigation systems illustrates the diverse approaches possible in implementing artificial intelligence for autonomous robotics applications. Roomba’s adaptive intelligence approach provides flexibility and robustness across varied environmental conditions while Neato’s precision navigation offers systematic efficiency and detailed environmental analysis. Both platforms demonstrate successful implementations of complex AI technologies in consumer products that deliver practical value and enhanced convenience to millions of users worldwide.
The choice between these navigation philosophies ultimately depends on specific user requirements, environmental characteristics, and personal preferences regarding cleaning predictability versus adaptability. The continued development of both approaches ensures ongoing innovation and improvement in cleaning robotics while contributing to broader advancements in artificial intelligence, autonomous systems, and smart home technology.
The success of these robotic cleaning systems demonstrates the maturation of artificial intelligence technologies from research laboratories to practical consumer applications that enhance daily life while showcasing the potential for AI-powered automation across numerous household and industrial applications.
Disclaimer
This article is for informational purposes only and does not constitute professional advice. The views expressed are based on current understanding of robotic navigation technologies and their implementations in commercial cleaning systems. Readers should conduct their own research and consider their specific requirements when selecting robotic cleaning solutions. Product capabilities and features may vary by model and manufacturer, and performance may differ based on environmental conditions and usage patterns.